Creating a Dispensing Program
Robot27 recommends starting with a simple program to get the dispensing parameters set correctly before programming more complex paths. Straight lines on flat surfaces work best for testing.
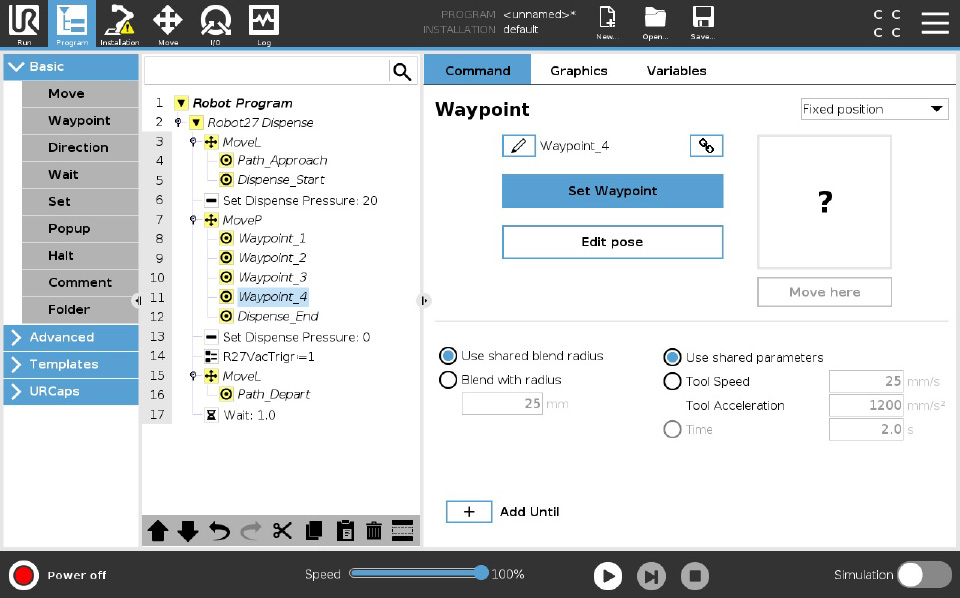
- In Polyscope, click on the Program tab, then on the URCaps dropdown menu, then on Robot27 Dispense to add a new dispensing node to your robot program.

2. Set the location of the four pre-defined waypoints:
- Dispense_Start – The starting point for the dispensing path
- Path_Approach – a point above Dispense_Start which the robot moves to before dispensing begins
- Dispense_End – the ending point for the dispensing path
- Path_Depart – a point above Dispense_End which the robot moves to after dispensing is completed

3. Run your program to test the dispensing routine created. NOTE: Robot27 recommends turning the air supply off for the first tests of the program to ensure robot motion is correct. Then, turn on the air supply and rerun the program to test material dispensing.
4. Adding more waypoints to the MoveP command before the Dispense_End waypoint allows you to program more complex paths after testing is complete.
Adding Additional Waypoints