How to Pick the Right Gripper for Your Cobot
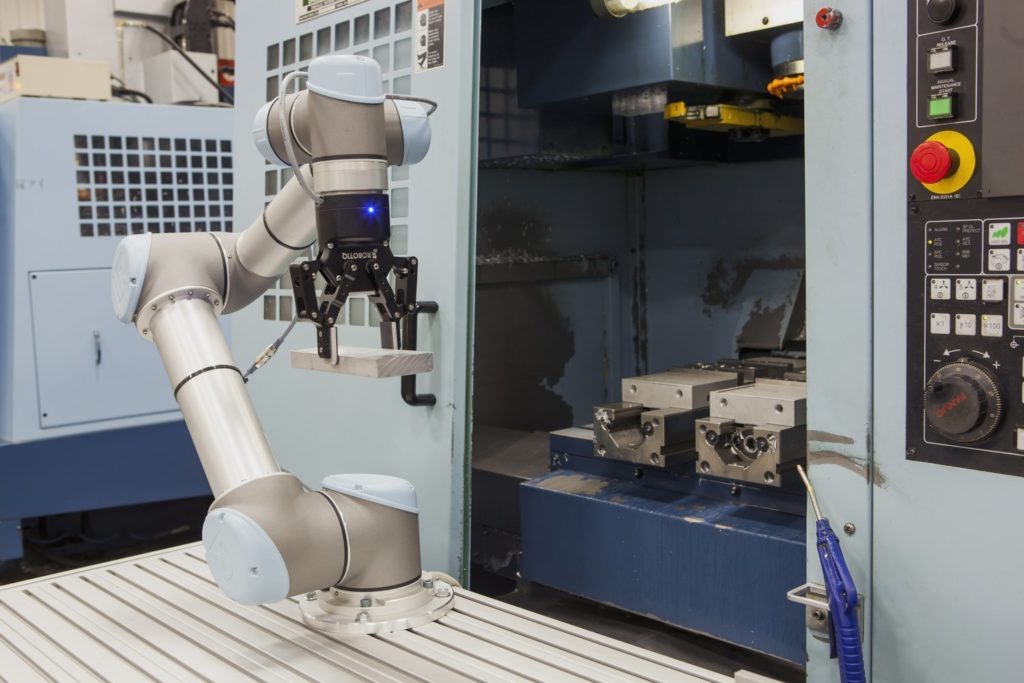
Nearly every collaborative robot automation project requires the cobot to pick up or manipulate a part. In fact, there is an entire category of end-effectors we call grippers – those which attach to the cobot to allow it to pick up or grip onto some work piece or part. There are nearly as many grippers on the market as there are parts needing to be picked up. In this article, we aim to steer you towards picking out the right gripper for your next automation project.
Broadly, there are two ways that most grippers can be operated: via a source of compressed air or vacuum or mechanically through some electricity source. Deciding on the right gripper for your application depends largely on the parts you need to pick up and the resources already available in your work space.
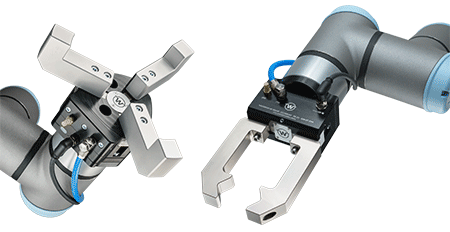
Pneumatic grippers require some source of compressed air either to open and close the gripper’s jaws which grip the parts being handled or to create a vacuum which is used to pick up parts. Jaw-type pneumatic grippers are useful for picking up small- to medium-sized individual parts which need to be manipulated precisely – think about an assembly application where the cobot is used to place or install several components onto a work piece. Vacuum grippers are generally best for picking up larger object or in situations where more precise manipulation is not required.
A good example would be picking up cardboard boxes or other flat, smooth objects to move them from a conveyor to a pallet or from one workspace to another. Vacuum grippers come in many flavors as well, with suction cups or foam-covered vacuum chambers being just two examples. For manufacturing spaces that already have compressed air on site, pneumatic grippers allow flexibility and strength while utilizing existing resources at your manufacturing space.
Electric grippers are perfect for many part-handling applications. These grippers also come in many styles – from grippers with integrated force sensing so that a specific amount of force can be applied to the part being picked up to grippers with four or five “fingers” allowing parts to be picked up similarly to a human hand to electrically powered versions of the pneumatic jaw-type grippers – there is a wide variety to choose from. Many electric grippers available on the market today can be connected directly to the cobot for both control of the fingers and for the gripper’s source of power. Some have software components which make controlling them very simple with Universal Robots’ programming interface. Others require a simple 24 volt signal to open or close the jaws or fingers.
Selecting the right gripper is very important for any application. Robot27 provides the guidance you need to select the right one for your project. We can provide as much or as little help as you need – from complete engineering and programming of an entire collaborative work cell to consulting with your automation engineers to help them decide on the best hardware or the best design practices.